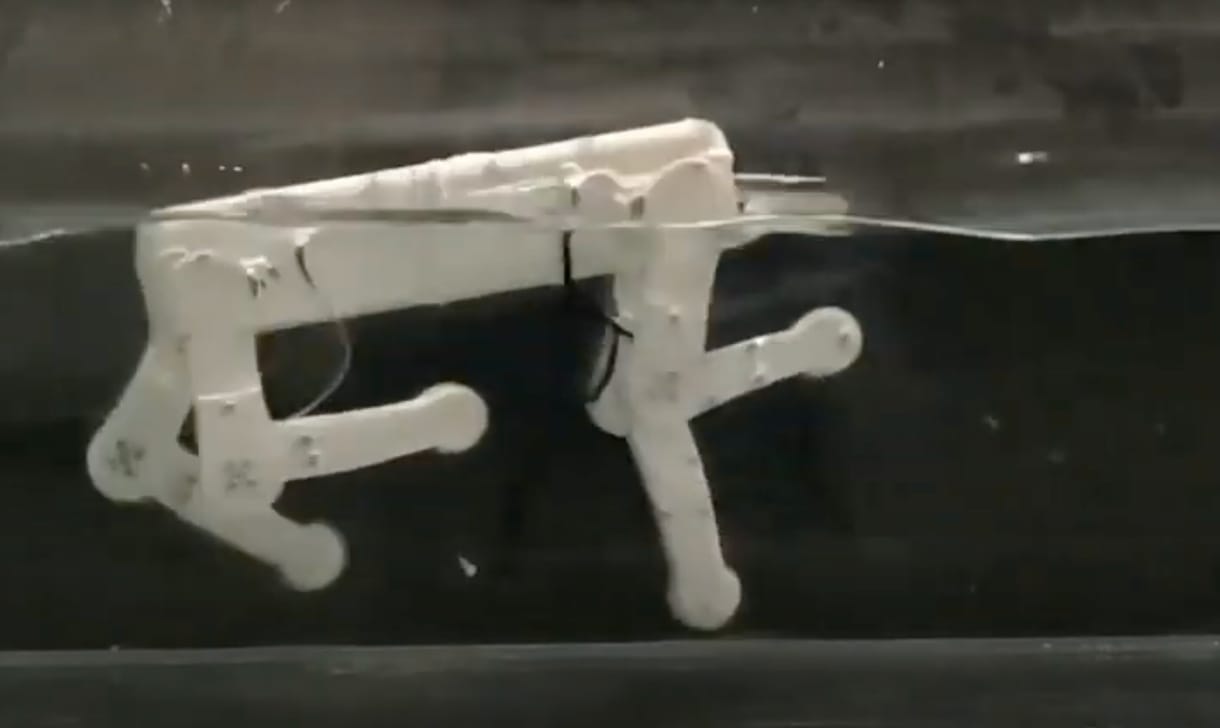
Alig valamivel több mint két kilót nyom és mindössze 30 centi hosszú és 10 centi széles ARD (Amphibious Robot Dog), azaz a kétéltű robotkutya, amely túllépett a robotkutyák nagy problémáján, a vízben való úszáson. ARD ugyanis nemcsak a futásban jó, hanem a kutyaúszásban is remekel. Ez konkrétabban azt jelenti, hogy a robotkutya 0,576 km/h-s sebességet ért el vízben, szárazföldön pedig 1,26 km/h sebességet, így sokoldalú mobilitást kínál mindkét környezetben.
A korábbi, elsősorban hüllőkről vagy rovarokról mintázott kétéltű robotokkal ellentétben ez az új kétéltű robotkutya az emlősök úszásmechanikájából merít ihletet, hogy kiváló mobilitást érjen el mind szárazföldön, mind víz alatt. Egy olyan robot megalkotása viszont, amely több környezetben is jól teljesít, nagy kihívását jelent. A vízállóságra és a felhajtóerőre helyezett túlzott figyelem veszélyeztetheti a robot szárazföldi sebességét és mozgékonyságát, míg a szárazföldi mozgás optimalizálása gyakran lehetetlenné teszi a vízben való haladást.
Az innovatív robot úszási képességeinek kialakításához a vízben evező valódi kutyákat figyelték meg a szakemberek, és egy olyan egyedi evezőmechanizmust terveztek, amelyik gondosan utánozza a kutyák úszási mozgását. Az ARD-t azonban nem csupán vízálló, úszó négylábúként képzelték el, hanem nagy hangsúlyt fektettek a súlypont és a felhajtóerő közötti egyensúly megteremtésére, hogy biztosítsák a stabil és hatékony vízi teljesítményt, azonban emellett megőrizték a szárazföldi járás képességét is.
A robot megépítése előtt a kutatók elméleti modellezést és kísérleti méréseket végeztek a hidrodinamikai erőkről. Elemezték, hogy a különböző lábmozgások hogyan teljesítenének víz alatt, majd gyakorlati teszteléssel próbálták ki ezeket az előrejelzéseket – magyarázza a Science Blog.
Science Blog
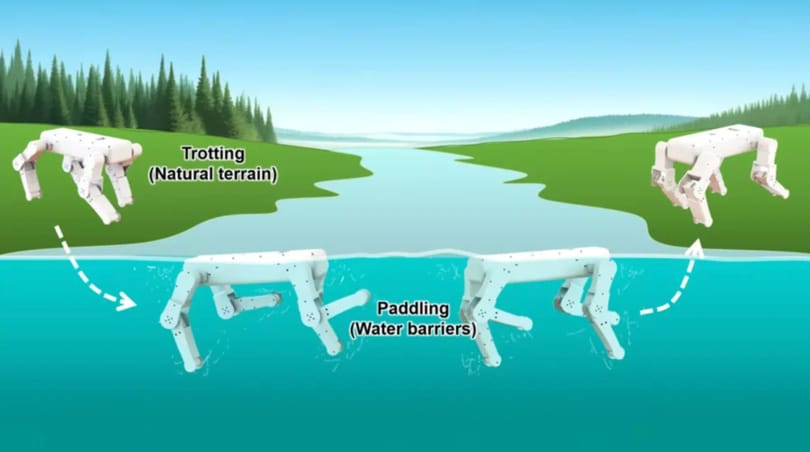
A csapat háromféle evezési járásmódot fejlesztett és tesztelt. Ebből kettő kutyás evezés ihlette megközelítés volt, amelyben a sebességre és a meghajtásra optimalizáltak, és volt egy ügetésszerű evezési stílus, amelyet a vízben való fokozott stabilitás érdekében terveztek. A kiterjedt kísérletezés során a kutyás evezési módszer jobbnak bizonyult a sebesség szempontjából, míg az ügetőszerű stílus a stabilitást helyezte előtérbe, pontosan úgy, ahogy azt a csapat elméleti modelljei előre jelezték.
Ezt, a Bioinspiration & Biomimetics folyóiratban bemutatott fejlesztést különösen fontossá teszi a valós alkalmazásokban rejlő potenciál. A változatos terepen való zökkenőmentes navigáció képessége átalakíthatja a környezeti feltérképezését, a katasztrófaelhárítást és az összetett környezetek feltárását.
Ha máskor is tudni szeretne hasonló dolgokról, lájkolja a HVG Tech rovatának Facebook-oldalát.