Szeretne azonnal értesülni a legfontosabb hírekről?
Az értesítések bekapcsolásához kattintson a "Kérem" gombra!
Az értesítés funkció az alábbi böngészőkben érhető el: Chrome 61+, Firefox 57+, Safari 10.1+
Köszönjük, hogy feliratkozott!
Hoppá!
Valami hiba történt a feliratkozás során, az oldal frissítése után kérjük próbálja meg újra a fejlécben található csengő ikonnal.
Már feliratkozott!
A böngészőjében az értesítés funkció le van tiltva!
Ha értesítéseket szeretne, kérjük engedélyezze a böngésző beállításai között, majd az oldal frissítése után kérjük próbálja meg újra a fejlécben található csengő ikonnal.
[{"available":true,"c_guid":"6bebf455-d600-4b5c-930a-194241a93559","c_author":"HVG","category":"gazdasag","description":"A magyar iparral kapcsolatban már annak is örülhetünk, hogy áprilisban „csak” 2,3 százalékkal volt alacsonyabb az egy évvel korábbihoz képest. Márciushoz képest ugyanakkor még nőni is tudott, de ez nem a kormány kedvenc ágazatainak köszönhető, és kérdés, nem csak egyszeri alkalom-e.","shortLead":"A magyar iparral kapcsolatban már annak is örülhetünk, hogy áprilisban „csak” 2,3 százalékkal volt alacsonyabb...","id":"20250606_ipari-termeles-statisztika-ksh-gazdasag-tovabbra-is-lejtmenetben-az-ipar-ebx","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/6bebf455-d600-4b5c-930a-194241a93559.jpg","index":0,"item":"e2c72847-fbd0-4d06-8b96-8505512487dc","keywords":null,"link":"/gazdasag/20250606_ipari-termeles-statisztika-ksh-gazdasag-tovabbra-is-lejtmenetben-az-ipar-ebx","timestamp":"2025. június. 06. 10:24","title":"Végre jött egy minimális jó hír a magyar iparról, de az elemző szerint a jövőkép még mindig csúnyán néz ki","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"e2f0c4f9-b5e0-4105-9ed7-5606ae9525f6","c_author":"HVG","category":"tudomany","description":"Az iOS és több más rendszer mellett az AirPodsokhoz is bejelenthet új képességeket az Apple – mutatjuk, mi mindenre lehet számítani.","shortLead":"Az iOS és több más rendszer mellett az AirPodsokhoz is bejelenthet új képességeket az Apple – mutatjuk, mi mindenre...","id":"20250605_apple-airpods-fulhallgatok-wwdc-uj-funkciok-bejelentes","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/e2f0c4f9-b5e0-4105-9ed7-5606ae9525f6.jpg","index":0,"item":"675cdb28-608d-45dd-bb58-c29fc1f142bf","keywords":null,"link":"/tudomany/20250605_apple-airpods-fulhallgatok-wwdc-uj-funkciok-bejelentes","timestamp":"2025. június. 05. 12:03","title":"Ingyen jöhet egy rakás új funkció az Apple fülhallgatóiba","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"b8694eb4-a446-4612-a4b5-21e6aa17deef","c_author":"hvg.hu","category":"itthon","description":"Az intézmény nem gyűjt adományokat közterületen, senki ne adjon pénzt idegeneknek, akik a kórház nevében kérnek támogatást.","shortLead":"Az intézmény nem gyűjt adományokat közterületen, senki ne adjon pénzt idegeneknek, akik a kórház nevében kérnek...","id":"20250605_Csalok-kernek-penzt-az-utcan-a-Heim-Pal-gyermekkorhaz-neveben","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/b8694eb4-a446-4612-a4b5-21e6aa17deef.jpg","index":0,"item":"6fb24cfa-8236-46c0-ba7b-23e446b328c1","keywords":null,"link":"/itthon/20250605_Csalok-kernek-penzt-az-utcan-a-Heim-Pal-gyermekkorhaz-neveben","timestamp":"2025. június. 05. 10:19","title":"Csalók kérnek pénzt az utcán a Heim Pál gyermekkórház nevében","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"642e82db-65dd-425a-a75c-bb999e101fda","c_author":"Nemes Nikolett","category":"360","description":"Már gyerekkorban megtanuljuk, hogy az evésnek rengeteg funkciója van, aminek semmi köze az éhséghez – például az érzelmek kezelése, így nem csoda, hogy sokan már a fogyókúra közben jelentkező első feszültségre is túlevéssel reagálnak. Miért fontos, hogy (újra) megtanuljunk kapcsolódni a testünkhöz, hogyan lehet felülírni a rossz berögződéseket, és miért baj, ha evés közben a kedvenc sorozatunkat nézzük? Kohlné Dr. Papp Ildikó pszichológussal, dietetikussal beszélgettünk.","shortLead":"Már gyerekkorban megtanuljuk, hogy az evésnek rengeteg funkciója van, aminek semmi köze az éhséghez – például...","id":"20250606_hvg-mindent-vagy-semmit-fogyas-pszichologiai-buktatok-tartsadalom-etkezes-erzelmek","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/642e82db-65dd-425a-a75c-bb999e101fda.jpg","index":0,"item":"1154d7b9-696a-4370-9a40-a48947df4dd9","keywords":null,"link":"/360/20250606_hvg-mindent-vagy-semmit-fogyas-pszichologiai-buktatok-tartsadalom-etkezes-erzelmek","timestamp":"2025. június. 06. 13:55","title":"Érzelmek a fogyás útjában – hogyan törjünk ki a túlevéshez vezető ördögi körből?","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":true,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"ca097fbd-ddcb-4821-881c-49b433d07a1f","c_author":"HVG","category":"cegauto","description":"A műszer ára körülbelül ezer forint – a fejlesztési, gyártási költségekkel együtt.","shortLead":"A műszer ára körülbelül ezer forint – a fejlesztési, gyártási költségekkel együtt.","id":"20250605_sorosdoboz-gyorshajtok-ellen-barkacstraffipax","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/ca097fbd-ddcb-4821-881c-49b433d07a1f.jpg","index":0,"item":"272cbfab-c821-400e-b6f1-8acd8058839a","keywords":null,"link":"/cegauto/20250605_sorosdoboz-gyorshajtok-ellen-barkacstraffipax","timestamp":"2025. június. 05. 10:35","title":"Két sörösdobozzal a gyorshajtók ellen – a Balatonnál fotózták ezt a barkácstraffipaxot","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"30bf5d8e-3239-4e6e-85ab-e7f2b92321fa","c_author":"HVG","category":"elet","description":"Négy vádlottja van a „drogos énekesnő” néven elhíresült ügyben. A kábítószer beszerzője, az élettársa, a celeb-kapcsolattartó és a futár állt bíróság elé.","shortLead":"Négy vádlottja van a „drogos énekesnő” néven elhíresült ügyben. A kábítószer beszerzője, az élettársa...","id":"20250605_topceleb-drogos-enekesno-birosag-kabitoszer","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/30bf5d8e-3239-4e6e-85ab-e7f2b92321fa.jpg","index":0,"item":"88074072-7376-47ae-8901-ae08cf244de5","keywords":null,"link":"/elet/20250605_topceleb-drogos-enekesno-birosag-kabitoszer","timestamp":"2025. június. 05. 14:14","title":"Blikk: Egy topceleb neve is felbukkant a drogozó énekesnő ügyében","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"35330506-142e-49de-9c08-9fe57854db7c","c_author":"Sztojcsev Iván","category":"360","description":"Döbbenetes szintekig ment le az amerikai politika, amikor csütörtökön élőben figyelhettük, amint Donald Trump és Elon Musk egymásnak esik. De min vesztek össze annyira, hogy az X-en gyalázzák egymást, mit reagálnak a trumpista szavazók, és egyáltalán, mi jöhet most?","shortLead":"Döbbenetes szintekig ment le az amerikai politika, amikor csütörtökön élőben figyelhettük, amint Donald Trump és Elon...","id":"20250606_musk-trump-usa-twitter-spacex-tesla-veszekedes","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/35330506-142e-49de-9c08-9fe57854db7c.jpg","index":0,"item":"d2f43264-b9fe-4164-929d-d8c2fa994be3","keywords":null,"link":"/360/20250606_musk-trump-usa-twitter-spacex-tesla-veszekedes","timestamp":"2025. június. 06. 15:53","title":"Pár poszt választotta el a világot attól, hogy Musk leírja: „Trump egy geci”","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":true,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null},{"available":true,"c_guid":"560fcc36-f85c-4a1d-84e2-a164d90eb5d2","c_author":"HVG","category":"cegauto","description":"A látványos külsejű Alfa Romeo TZ3 olyan ritka, hogy sokan nem is tudnak a létezéséről.","shortLead":"A látványos külsejű Alfa Romeo TZ3 olyan ritka, hogy sokan nem is tudnak a létezéséről.","id":"20250607_olasz-vipera-84-literes-motorral-var-uj-gazdara-ez-a-szuperritka-alfa-romeo-tz3-stradale","image":"https://img.hvg.hu/Img/ffdb5e3a-e632-4abc-b367-3d9b3bb5573b/560fcc36-f85c-4a1d-84e2-a164d90eb5d2.jpg","index":0,"item":"b916b8a5-1251-4be9-bb3a-d9acff6211d1","keywords":null,"link":"/cegauto/20250607_olasz-vipera-84-literes-motorral-var-uj-gazdara-ez-a-szuperritka-alfa-romeo-tz3-stradale","timestamp":"2025. június. 07. 07:21","title":"Olasz vipera: 8,4 literes motorral vár új gazdára ez a szuperritka Alfa Romeo","trackingCode":"RELATED","c_isbrandchannel":false,"c_isbrandcontent":false,"c_isbrandstory":false,"c_isbrandcontentorbrandstory":false,"c_isbranded":false,"c_ishvg360article":false,"c_partnername":null,"c_partnerlogo":"00000000-0000-0000-0000-000000000000","c_partnertag":null}]
A HUN-REN SZTAKI Rendszer- és Irányításelméleti Kutatólaboratóriumának (SCL) szakemberei olyan rendszert fejlesztettek, ami nagymértékben képes arra, hogy a drónok önálló módon tudjanak repülni, és reagáljanak a váratlan helyzetekre is.
Ahhoz, hogy egy drón biztonságosan tudjon önállóan repülni, tudnia kell, hol van, mi van körülötte, és merre érdemes haladnia. Ehhez nem elég előre beállítani a repülési pályát, villámgyors, rögtönzött alkalmazkodásra van szükség. Egy arra szálló madár, az építkezés miatt felállított daru, vagy akár egy hirtelen széllökés is felülírhatja az eredeti útvonaltervet.
Az autonóm drónokat különféle érzékelők segíthetik a tájékozódásban: GPS, gyorsulás- és forgásisebesség-mérők, kamerák, illetve a LIDAR, ami a radarhoz hasonlóan működik, de rádióhullámok helyett lézerrel térképezi fel a környezet tárgyait és akadályait. A probléma azonban ezzel csak fokozódik: ha túl sok szenzort szerelnek a szakemberek a drónra, azzal pontosabban tud repülni, de nehezebb lesz, így nagyobb lesz az energiafogyasztása is. Márpedig egy ilyen eszköz csak korlátozott súlyt bír el, és akkumulátorának kapacitása is véges.
Ezért van szükség okos, hatékony irányítási megoldásokra – a cél nem az, hogy minden apró adatot észleljen és rögzítsen az eszköz, hanem az, hogy pont annyit érzékeljen és dolgozzon fel, amennyi a gyors, biztonságos döntésekhez elegendő.
A HUN-REN SZTAKI Rendszer- és Irányításelméleti Kutatólaboratóriumának (SCL) szakemberei olyan szoftveres rendszereket fejlesztenek, amelyek képesek a rendelkezésre álló adatok alapján gyors és megbízható döntéseket hozni. „Ezek a rendszerek nemcsak előre terveznek, hanem a legkisebb váratlan változásra is reagálva folyamatosan tervezik újra a drón mozgását” – mondja Péni Tamás, az SCL kutatója. A szakember szerint nem elég azt tudni, hogy az adott pillanatban hol van az akadály, azt is fel kell mérnie az eszköznek, hogyan mozoghat az a tárgy a jövőben, és megfelelő biztonsági távolságok betartásával ehhez igazítania kell a saját mozgását is.
Ennek érdekében a repülési pálya kialakítása két szinten történik. Az egyik a globális szint, ami annak felel meg, mint amikor az autóval a GPS alapján elindul valaki az úti célja felé. A rendelkezésre álló térképek és információk alapján a drón ugyanígy tervezi meg előre az útvonalát. Amikor azonban váratlan helyzet adódik – például egy akadály kerül elé –, akkor életbe lép a lokális szintű tervezés, az eszköz változtat a röppályáján, sőt, ha kell, az egész további útvonalát is módosítja. Ha pedig több drón van egyszerre a levegőben, akkor ezek kommunikálni is tudnak egymással.
SZTAKI
Ha például az egyik új akadályt vesz észre – mondjuk egy darut, amit nem jeleztek a térképen –, ezt az információt azonnal meg tudja osztani a többi drónnal. Így minden eszköz egyetlen közös, valós idejű „térképen” dolgozik, és mindannyian képesek biztonságosan eljutni a célállomásra.
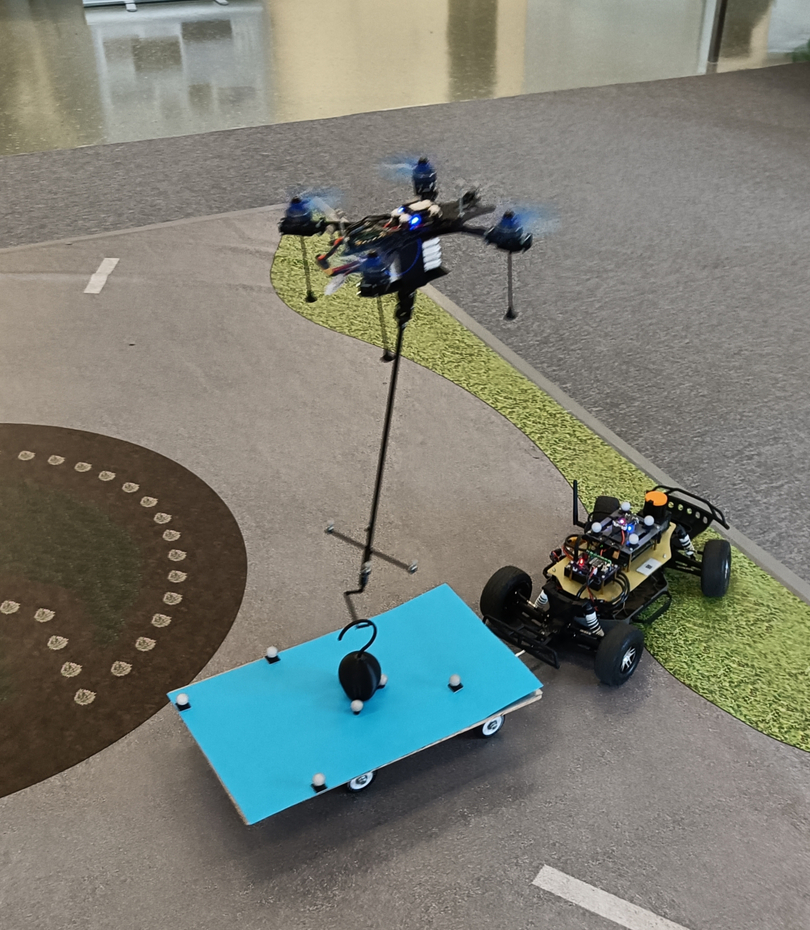
A magyar kutatók által kifejlesztett rendszerrel felszerelt drón képes arra, hogy egy egyszerű horog segítségével önállóan felvegye a csomagot a mozgó járműről, majd egy másik, szintén mozgó járműre kézbesítse – centiméteres pontossággal. Erre a műveletre jelenleg az egész világon csak a magyar laboratóriumban képesek a szakemberek.
A drónok repülését akadályozó tényezők miatt az első csomagszállító eszközök először vidéken emelkedhetnek majd a magasba, vagy a raktárakban kezdhetnek el dolgozni a fenti technológia segítségével. Hogy mikor, azt egyelőre még nem tudni.